Here we go! PreonLab 6.1 is out now.
It is loaded with new features and improvements, enabling new engineering possibilities and applications. Empowered by the new GPU capabilities, PreonLab 6.1 takes another leap forward in efficient computing, delivering results even quicker.
Read on to find out more about:
- Enhanced GPU performance: PreonLab’s GPU implementation just got a significant boost. Not only does PreonLab 6.1 support multi-GPU computing now, but it also enables continuous particle size (CPS), dynamic sampling, and adaptive sampling on GPU, making your simulations even more efficient.
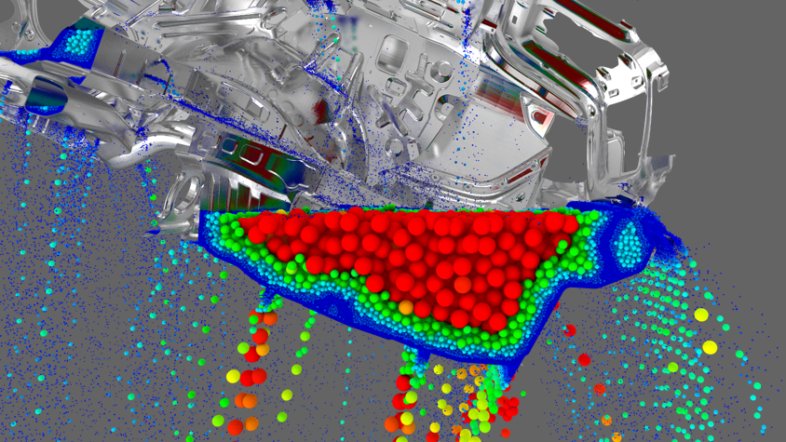
- Airflow and Car Suspension Model (CSM): PreonLab 6.1 also enables airflow import and CSM support for simulations on GPU. These are some of the key application enablers making it possible to simulate various use cases also on GPU.
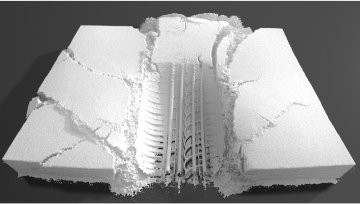
- Snow Model on GPU: Snow modeling has been an important part of existing PreonLab capabilities. We are thrilled to announce that our snow model is now also available on the GPU platform.
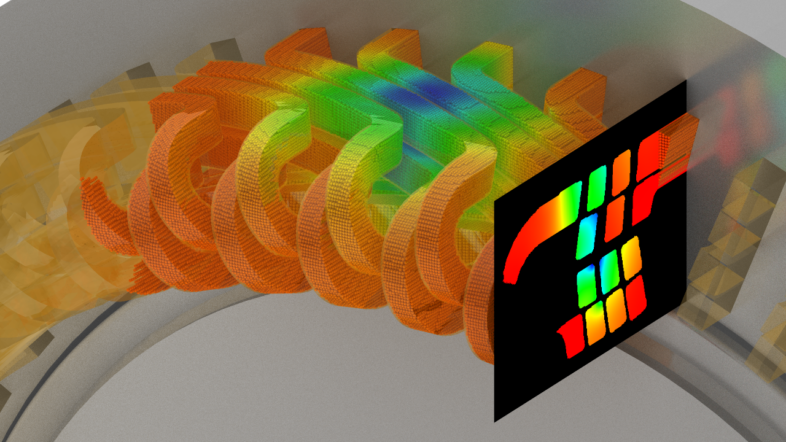
- Enhanced Thermodynamics: Convective boundary condition has been added to the list of available boundary conditions. Convective Boundary Conditions can represent a more physical heat transfer, that predominantly occurs due to convective heat transport at fluid-fluid or fluid-solid interfaces. It is designed to conveniently represent natural or forced convection of heated solid bodies or fluids, in applications like heat exchangers, heat sinks, and even e-motors.