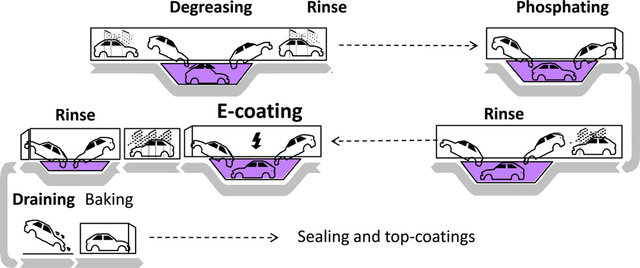
Figure 1: A typical E-coating process chain. [1]
Owing to PreonLab’s ease of use and particle-based approach, which eliminates the requirement to generate a computational mesh, the e-coating simulation can be set up quickly.
Design engineers can run multiple simulations, adjust the dip-and-drag-out movement virtually, and evaluate different design proposals. It is possible to analyze the efficiency of drainage holes in the vehicle body and make design changes if necessary or making changes to the trajectory itself. Finally, PreonLab can boast of a remarkable feature set which makes it a powerful tool when it comes to dip and drag processes.
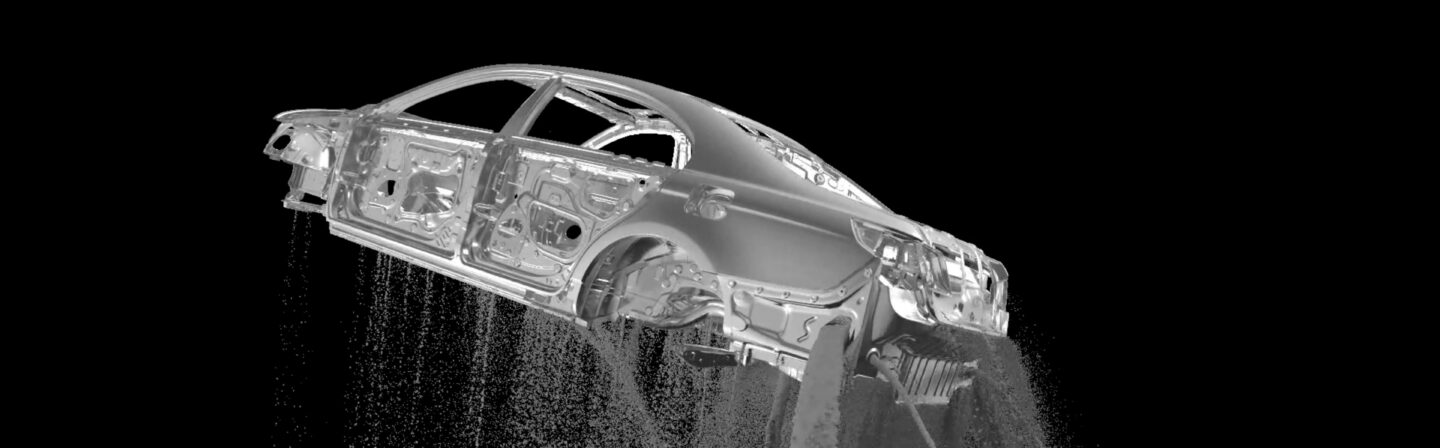
Video 1: E-coating simulation results rendered in PreonLab.
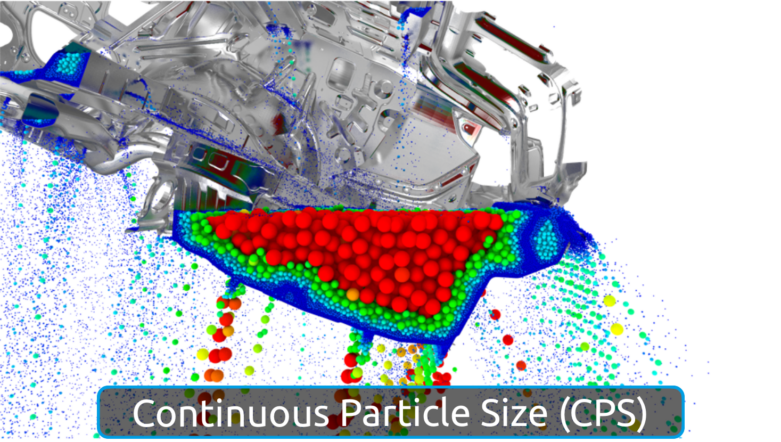

Video 2: Continuous Particle Size (CPS) algorithm used in the CFD simulation of the dip-and-drag-out part of the process.
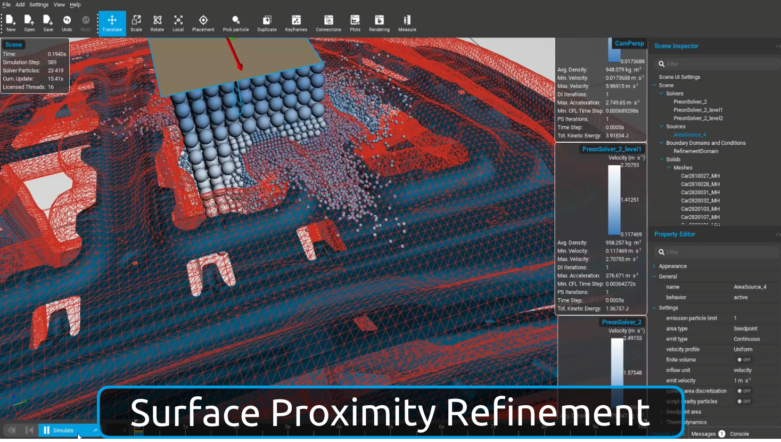
Video 3: Surface Proximity Refinement in PreonLab.
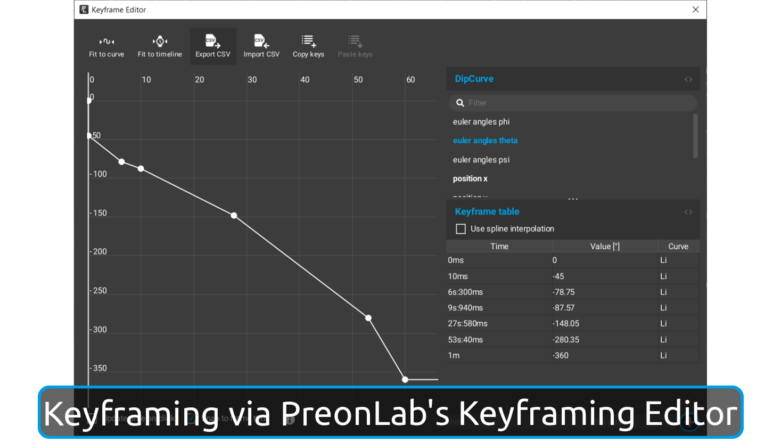
Video 4: Pitch axis rotation defined in the keyframe editor for the dip-and-drag-out motion.
Dip-and-drag-out fluid simulations in PreonLab can provide insights towards optimizing trajectories by virtually evaluating different design proposals, while allowing engineers to predict fluid drainage time, measure forces on the vehicle body, and determine their extent of fluid contact on individual components. Additionally, these simulations help detect fluid puddles and this remaining fluid can be exported as a mesh out of PreonLab for further analysis and post-processing.
Video 5: The data from the wetting sensors used to colorize the vehicle body.
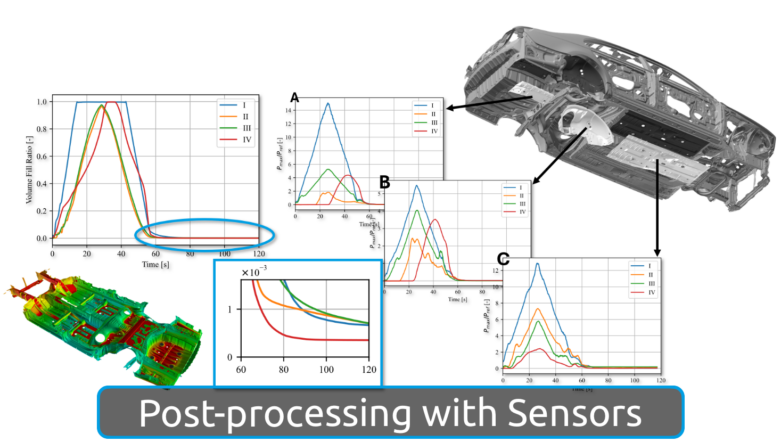
PreonLab’s force sensors can measure the forces and pressures exerted on the vehicle body during the dip-and-drag-out process. These sensors allow users to quantify the forces, pressures, stresses, and torques acting on every component of the vehicle body, providing detailed insights into the structural performance during the process.
Video 6: The evolution of the normalized cumulative maximum pressure values acting on the vehicle body.
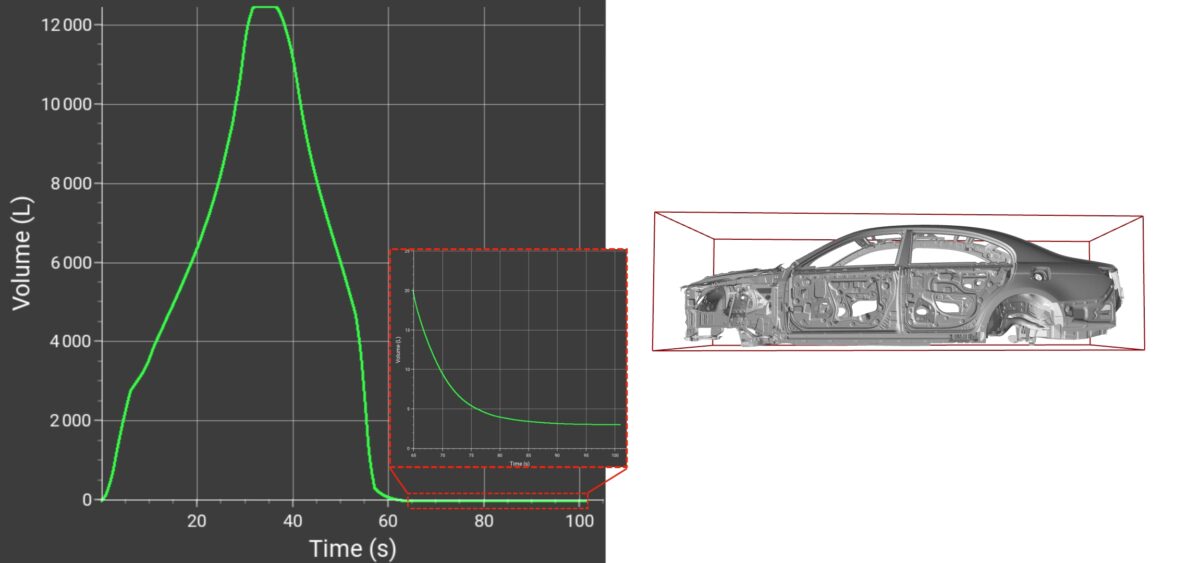
Figure 2: The evolution of the fluid volume in the vehicle over time.
Typically, when the Body-In-White is dragged out of the liquid container, some liquid remains in the compartment and will most likely never be drained. This is very common in the industry for initial design variants.
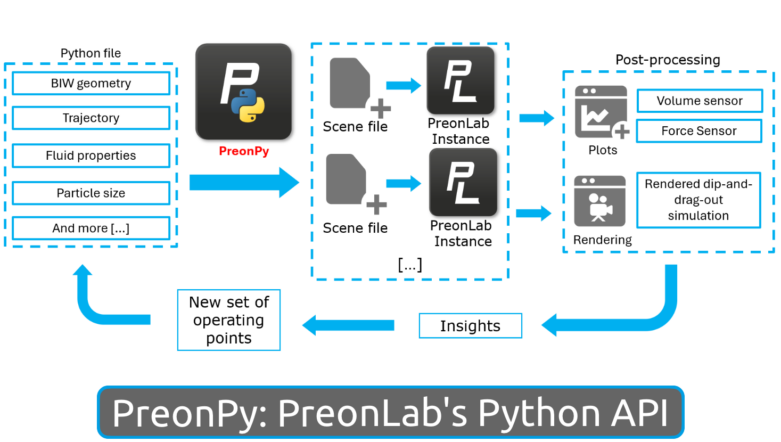
Usually, engineers are more often interested in larger liquid puddles, which can lead to cross-contamination in the subsequent steps of the e-coating process. With the help of PreonLab’s Python API, known as PreonPy, it is possible to detect fluid puddles automatically. Moreover, the leftover fluid puddles can be meshed using PreonLab’s built-in mesher, called the Preon Mesher. The meshes can then be exported fully or partially as CAD files. These can then be imported into other software for simulation, design, or analysis purposes.
Video 7: The left-over fluid puddles in the vehicle body.
PreonLab offers unique features that greatly facilitate e-coating process chain design and assist engineers in identifying flaws in the process chain architecture before it is even constructed. Owing to PreonLab’s ease of use and the elimination of the requirement to generate a computational mesh, the user can quickly set up an e-coating simulation.With the help of CPS, proximity refinement, and powerful solver algorithms, PreonLab is able to accurately predict fluid behavior in the regions of interest efficiently. Furthermore, with built-in sensors, it is easy to predict drainage times, visualize forces on the vehicle, and evaluate design proposals. Moreover, with the built-in Python API (PreonPy), it is possible to enable target-specific and complex post-processing strategies to extract the most insight out of the simulation.
[1] G-L. Song, A dipping E-coating for Mg alloys, Progress in Organic Coatings,
Volume 70, Issue 4, 2011, pp. 252-258, doi.org/10.1016/j.porgcoat.2010.09.028