Easy geometry import and motion description
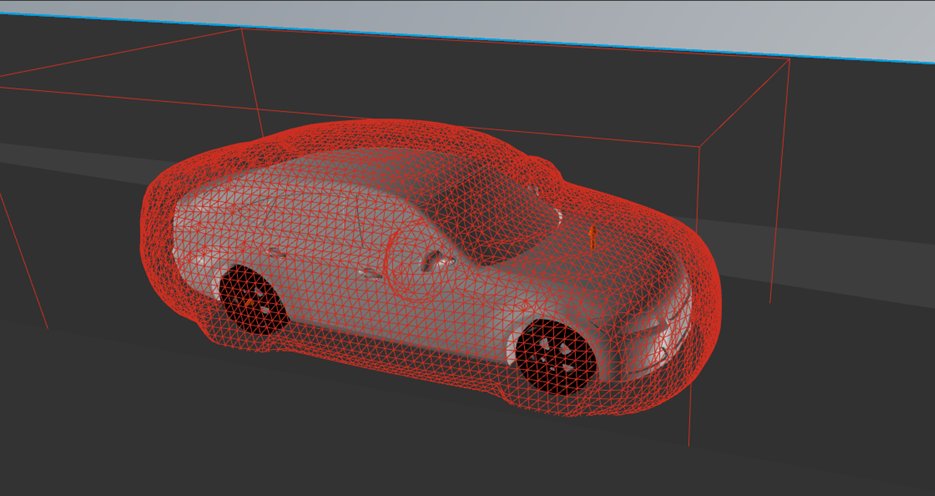
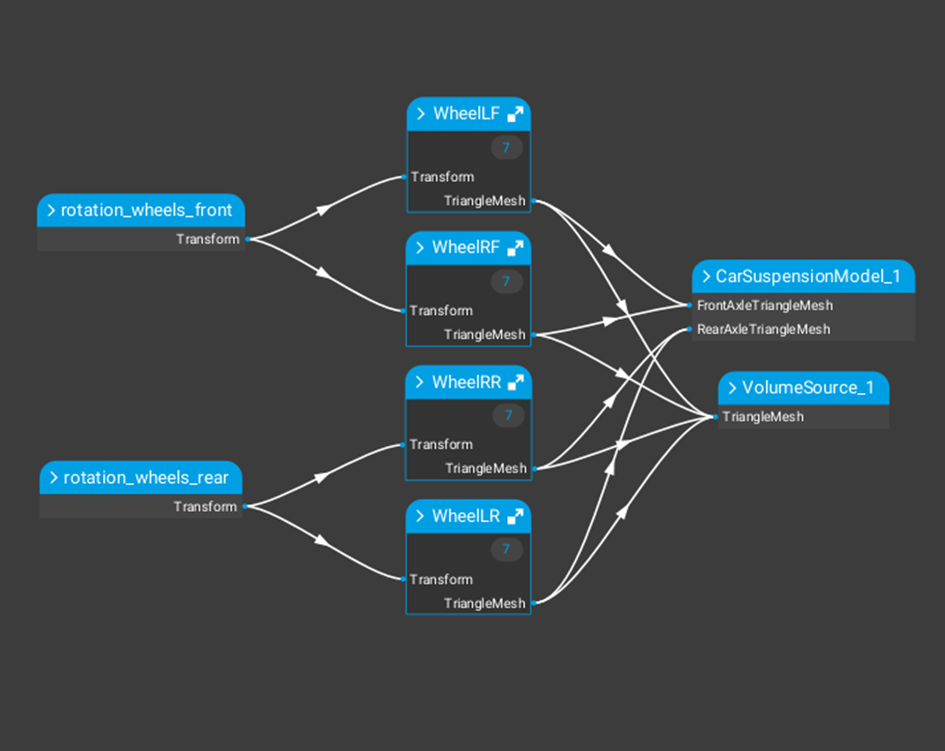
All you need to do is to import the wading channel geometry as well as your car geometries as .obj or .stl files into the simulation scene. The motion of the car geometry through the channel is described using convenient transform groups and a kinematics motion script.
The main goal of setting up all these transformations is to move the car through the wading channel, to consider the spinning of the wheels around their own axis and to consider the impact of fluid dynamics on the sprung parts of the car with the help of a car suspension model.
Car suspension model implementation
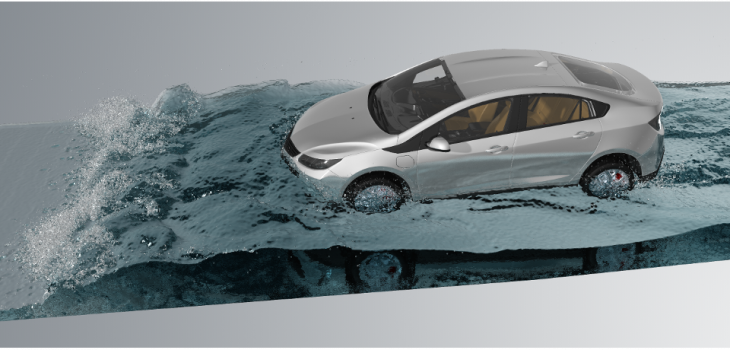
In wading simulations, the precise modeling of the car movement becomes increasingly important the faster the car moves and/or the higher the water level in the wading channel is. The position, orientation and velocity of the car when hitting the water pool determine the wave pattern in front of the car, height of the water splashes and the location of water, for example, whether water flows across the engine hood. Especially when comparing the simulation result to real-life wading tests, it is of high importance to consider all these variables. PreonLab provides a Car Suspension Model (CSM) that computes the deflection of the springs based on said forces and derives a re-positioning of the sprung car parts relative to the non-sprung parts, i.e., the wheels. It also provides a more advanced vehicle simulation model – AVL VSM – to expand on the car motion. This feature can automatically follow a non-planar road surface and consider the impact of e.g., potholes on the vehicle. It also allows for independent wheel movements for all four wheels.
Kinematics
The motion of the car through the channel over time is described with the help of a python script (transform_script in Video 1). The script projects the car onto the ground automatically. It contains several adjustable parameters that affect the water passage.
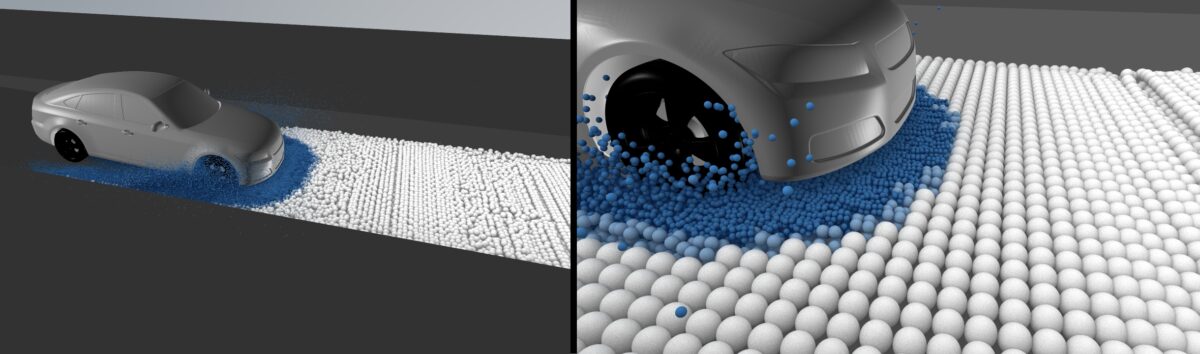
First, the duration of the car movement can be set to the whole simulation time range or a shorter time interval. Then, the user can provide the initial speed of the car (in [m/s]) and choose either a constant speed for the car or a velocity profile with the help of a CSV file. The script determines the position and the orientation of the car via the wheelbase by communicating with the Car Suspension Model object. Using the wheel radii, the script can derive the distance of the wheelbase to the ground and compute the wheel rotation speeds based on the current speed of the car.
With all the input parameters set, the script generates keyframes that let the car drive through the wading channel smoothly. The shape of the channel does not matter, allowing for almost arbitrary slopes. The only restrictions are that the car must drive along the x-axis and the script will only rotate the car around the y-axis (assuming that z-axis is the up axis) such that the wheels of the car always touch the channel surface. The script can be imported into PreonLab by selecting the file path location. You can also simply drag and drop the script onto the PreonLab window. The script will run automatically and after a few seconds, the script run should be finished. You can verify that the run was successful by choosing Playback from the drop-down menu and clicking the play button. Once you see that the car drives through the channel as expected, the kinematics setup is complete.
Video 1 demonstrates how the steps from part 1 can be completed within a matter of minutes.