FCSM is a built-in feature in PreonLab, and this integration streamlines the setup and reduces manual overhead by eliminating the need for external scripting.
All relevant parameters for vehicle motion can be defined directly within the FCSM object in PreonLab. These include masses for the sprung mass and wheels, moments of inertia for the sprung mass, spring and damper characteristics, and the vehicle’s trajectory profile.
Currently, with PreonLab 6.2, two types of inputs are supported to define the vehicle’s trajectory:
In this mode, the vehicle follows a specified velocity profile exactly.
This is ideal when the trajectory is derived from physical measurements at a test bench or from real-world data.
This mode considers external forces such as road gradient forces and fluid resistance in addition to user-defined acceleration. It is useful when users want to consider the impact of these external forces on the vehicle trajectory during simulation. The input acceleration can be interpreted as the acceleration by the drivetrain on a flat, dry road. A starting speed can also be specified.
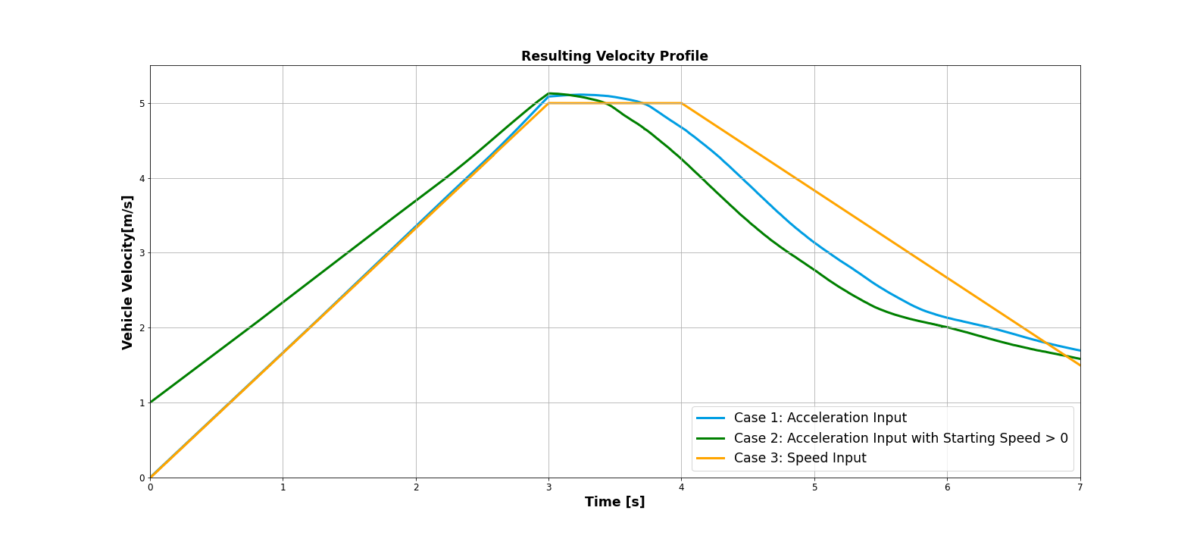
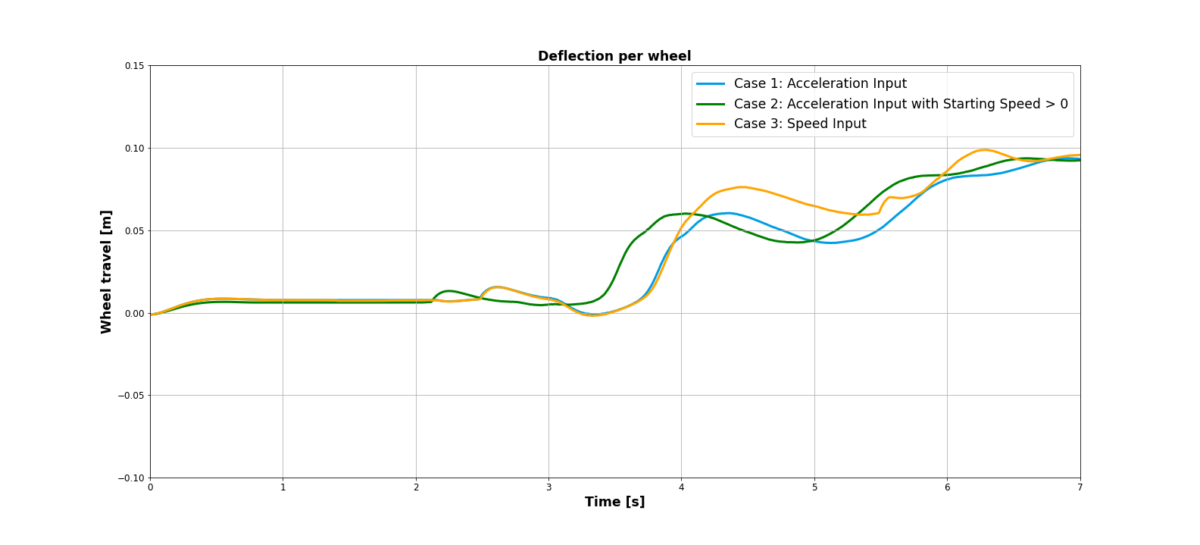
Videos 3, 4, and 5, and Figures 1 and 2 illustrate how different input modes affect vehicle behavior. A summary of the three simulated cases is provided in Table 1. The videos show the simulation results, while Figure 1 shows the resulting velocity profile for each case. The curve for case 3 strictly follows the input velocity, while the curves for case 1 and case 2 show the impact of the fluid forces and the road gradient on the resulting velocity profile. Figure 2 depicts the wheel deflection for the front left wheel of the vehicle, for each of the three cases.